DataStructure Graph AOE and AOV Network
Introduction
在本文,我们将会介绍两种DFS算法的基本应用:AOV网络和AOE网络
AOV
我们假设一个工作流如下:
我们定义一个原子化任务为,其中代表前置任务的集合。
在访问之前,需要满足以下的前提条件:
AOV网是对现实工作的真实建模,不同的工作之间往往存在先后之分。例如,你需要在学习数据结构之前学习程序设计。
如何根据工作流建立数据结构?很显然,我们可以使用拓扑排序和深度优先搜索来实现!首先,我们需要保证图是有向无环图,因为我们需要建模的是不同节点之间的依赖关系。
建模之后示例如下:
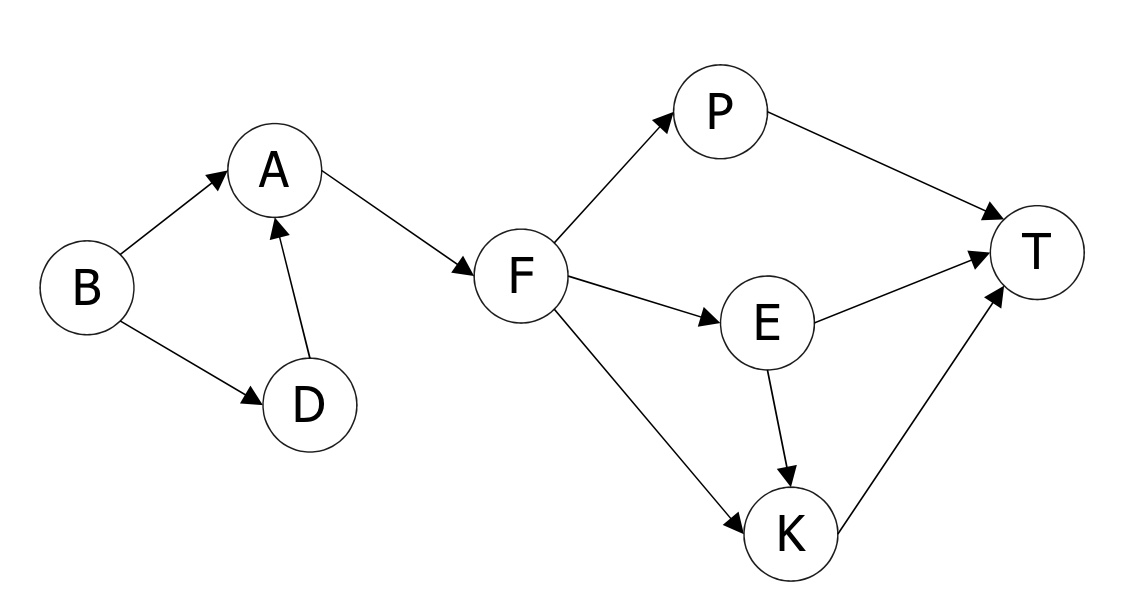
可以看到有向边代表的信息是不同节点之间的继承关系,而每个节点表示具体的原子任务,上文建模中的就是对应节点的所有first endpoint组成的集合,也就是入度。因此,我们把这种网络叫做 Activity on Vertex Network (AOV Network).
拓扑排序
如何实现拓扑排序?
- 首先找到一个入度为0的点。
- 入度为0可以形象地概括为这个节点的全部预备先修节点已经被访问了,逻辑上的
- 从这个节点开始,访问该节点。
- 在逻辑上删除它和从它出发的所有边。
- 对它的后继检查入度是否为0。
- 如果其后继存在入度为0的点,继续push进入队列。
- 如果队列为空但是并没有遍历完全,说明节点存在环,不符合有向无环图的定义。
时间复杂度:
一般来说,线性的图论算法如果使用邻接表存储可以达到的时间复杂度,如果使用邻接矩阵存储可以达到的时间复杂度。
- 如果为稀疏图,很大但是很小,此时邻接矩阵会存在严重的空间浪费问题,因此使用邻接表储存更方便。
- 如果为稠密图,很小但是很大,那此时邻接表的存储是非常高效且简单的,反而邻接表的使用更加的复杂。
AOE
In contrast, we have Activity on Edge Network (AOE Network) as follows:
顾名思义,我们此时需要把活动定义在有向边上,而不是在节点上。
我们假设在一个工作流存在若干个时刻,.这里只考虑离散化的时刻。我们把第一个时间节点定义为源点(), 把最后一个时间节点定义为,即汇点。
-
我们允许并行事件的发生
-
但是和AOV一样,事件之间存在严格的先后关系。
-
将活动定义在有向边上,而不是定义在节点上。
-
顶点代表事件,而有向边的权值代表某个活动的持续时间。有向边的方向代表事件先后的发生次序。
AOE网的关键:遍历所有节点的最长时间,以及那些节点事件是影响工程进度的关键事件。
因为我们允许时间并行,因此从源点到汇点的最长时间就是完成工程的最短时间。(当最长路径上的活动完成之后,其他路径长的活动肯定已经完成)
这貌似是一件很荒谬的事情,不过是正确的。
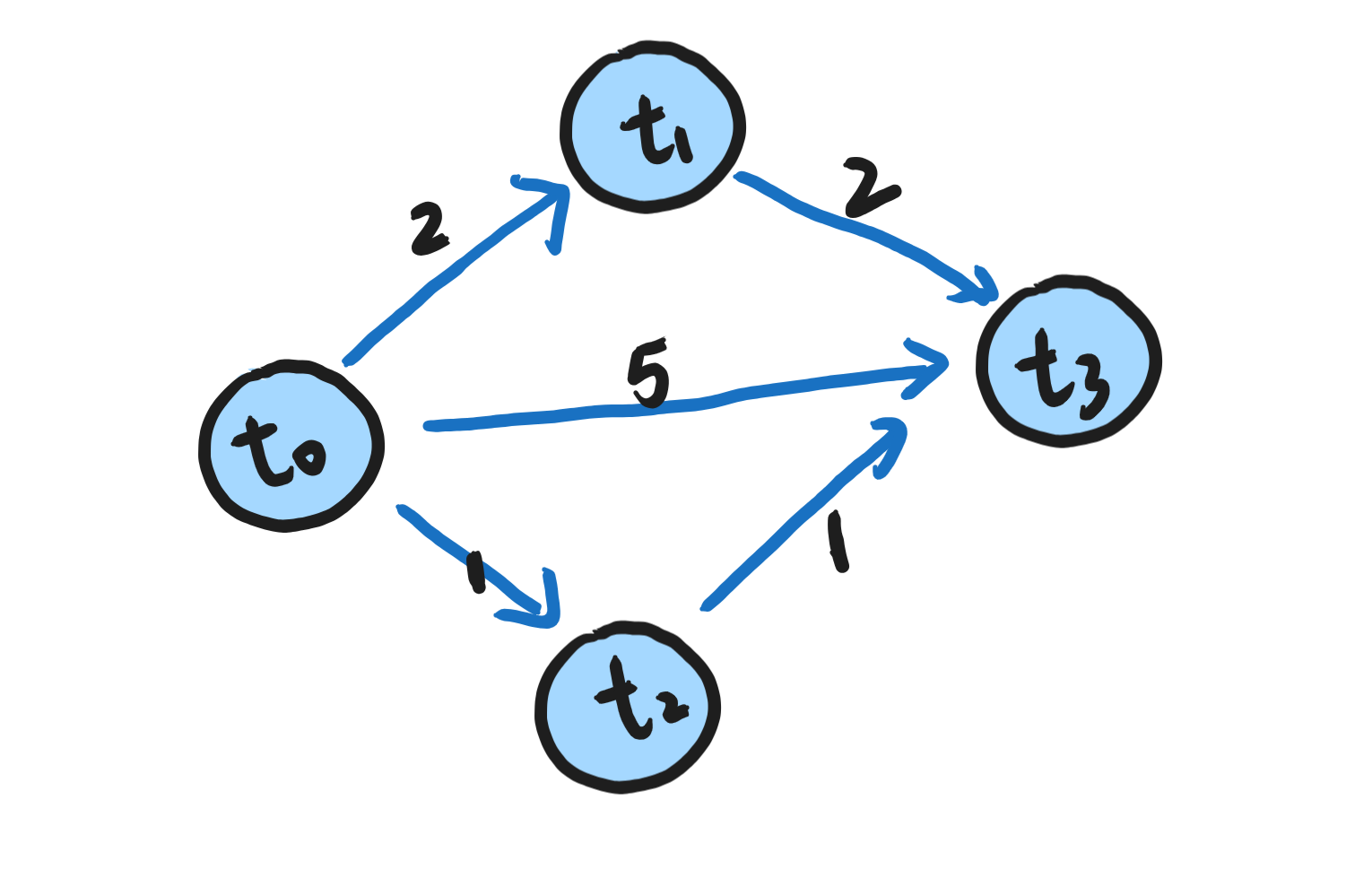
我们来看上面的图,把作为源点,作为汇点,我们的任务是要在尽可能的短的长度内遍历图上所有的点(允许并行)。
很显然,从起点到终点的最短路径长度为2,即走最下方的那条路。但是问题在于此时达到汇点之后需要等待上游两条路结束,此时我们的任务还没有完成。
我们可以理解为我们需要等最慢的支路完成了,此时才可以认为整体的支路完成了。
因此,我们就可以明确我们的目标:求从起点到终点最长的路径。
Given the starting point and the ending point , we need to find the longest path from to . (Practically, it means the worst situation of an event). We call it a critical event.
更新的算法也很简单,使用类似于动态规划的思想:
使用一次DFS遍历,不断更新下一个节点的最长长度。
不过同时,我们还需要计算顶点的最迟发生时间,转化一下就是如果我们倒着看,就是从终点向起点的最长发生时间。(在我们已知收点的最迟发生时间的情况下),按照逆拓扑序的顺序找到最小值。
如果最早发生时间 == 最迟发生时间,说明这个节点很关键(被卡脖子了)。