DataStructure B and B Plus Tree
外部查找和排序
外部存储
我们考虑如下的数据单元:
1 | |
key储存的是关键字值,而other储存的是其他信息。这样一种数据储存的方式非常的常见,例如json文件,或者我们在建立一个人口数据库,对每个人会有一个身份证号(关键字值)和其他信息(Other)组成。
但是问题在于,计算机的内存是非常有限的,如今配置较高的笔记本内存也仅仅在32GB中,如果为了一个查找程序把所有的数据塞入内存中,很显然是不显示的,因此我们需要储存在外部。
储存在外部的代价是访问速度的大幅度下降,1秒钟,可以执行条指令或进行次磁盘访问。对于储存在外存的数据中,数据的性能瓶颈关键在于外存数据的访问,即磁盘的访问数据。因此,如果我们要实现外部数据的高效查找,首先需要实现的就是尽可能少的做磁盘读写。
如何解决?
如果我们还是使用树的结构,毋庸置疑我们需要降低树的高度,即一棵树储存的不止两个子节点,这样就可以降低树的高度,实现尽可能少的内存访问次数。但是这样还是存在一个问题:我如何保证树的平衡特性?
因此,我们介绍新的数据结构:B树。
B树
显然,我们不希望外存上的数据变成一颗二叉查找树,因为这样树的每一次访问都将举步维艰。
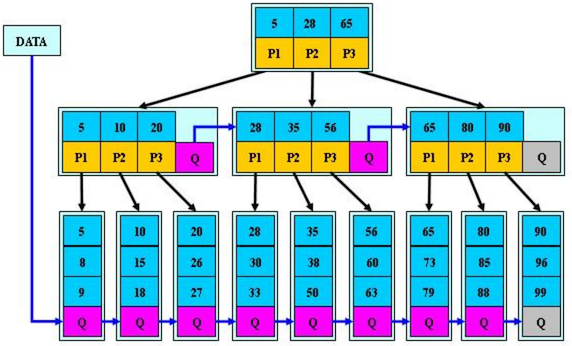
先来看一颗B树长什么样子:
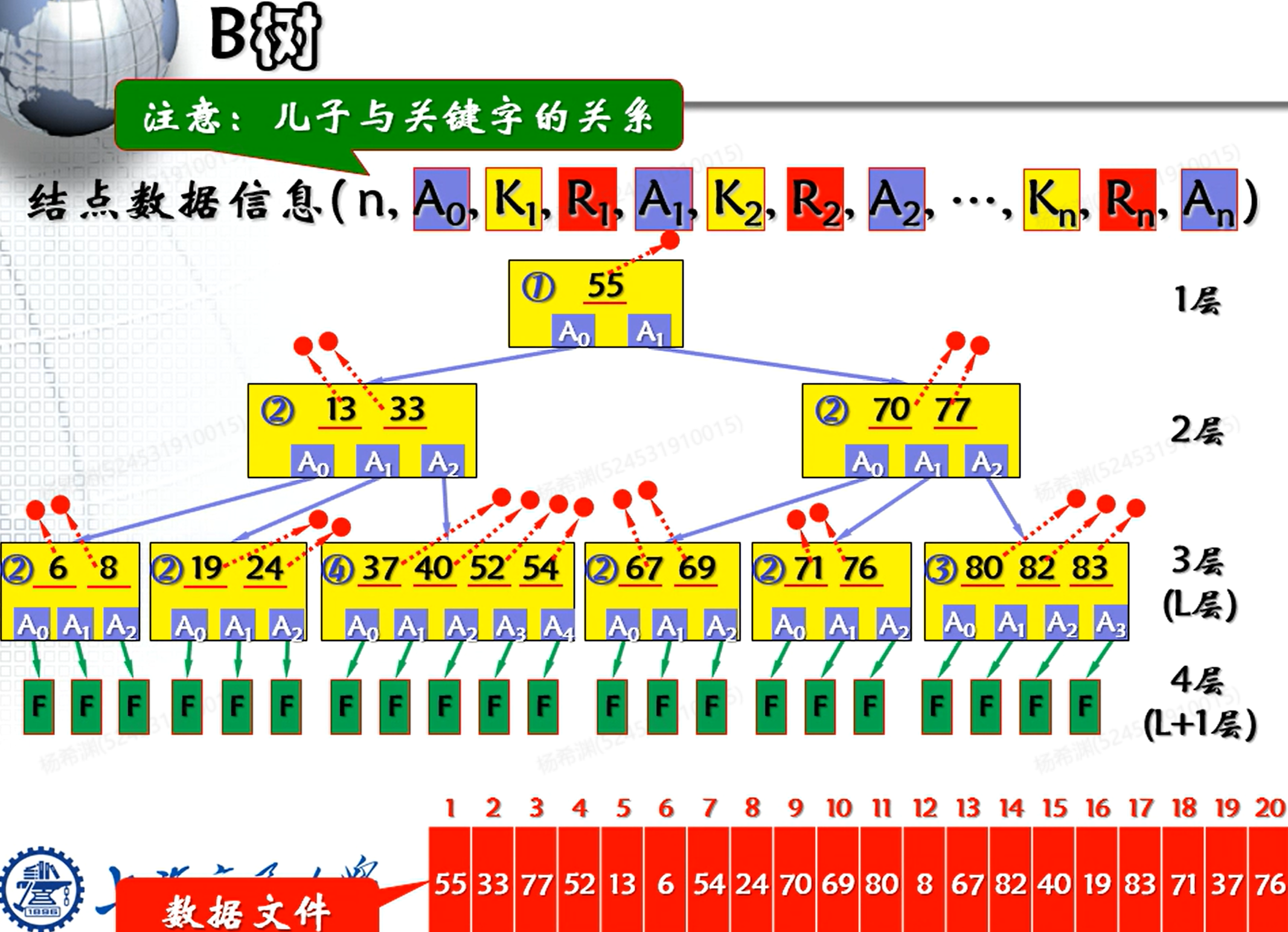
代表每一个节点的关键字的个数。(此时这个节点就有个儿子节点)
右下角红色的就是按照顺序存储的在外存中的数据文件,我们在内存中储存了一个B树,对于每一次问询(给出一个关键字),我们都需要现在储存在内存中的B树中进行查询,在查询到对应元素在外存中的地址之后再去访问磁盘,即去访问外存中对应的数据。
在B树中,储存的都是数据元素的指针。
Definition
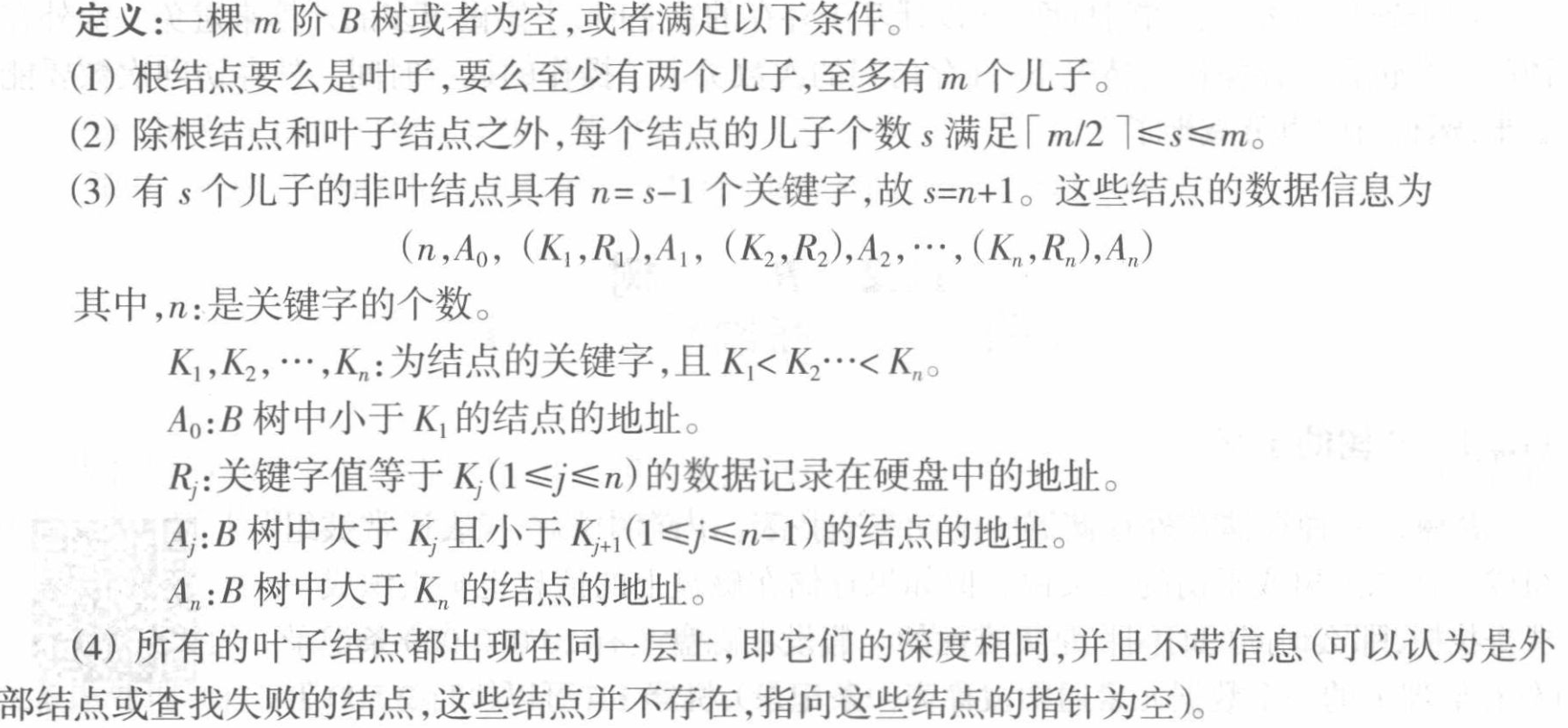
为了保证树的平衡性,B树需要再M岔树的基础之上额外添加一些定义的约束:
了解定义之后,再来看一眼B树:
同时,随着高度的增加,节点存储的关键字的个数增加,故可以保证树的高度是平衡的(这个被写进定义了)
其中为树的最小度数,n为含有的关键字的总数。
有关B树的定义非常的抽象,我们做一点注解:
- 每一个关键字可以看做是对后续节点做分化的隔板。
- 这本质上还是一颗有序的查找树!
- 为什么B树会保证不会退化始终平衡?因为他简单粗暴的保证了每一个节点存在一个最小度数$\left \lceil \frac{m}{2} \right \rceil $。
- B树是为外存储器设计的,这里的节点是广义节点,每一个节点内部可以储存很多个关键字值的信息。在实际中,可以把一个磁盘块储存为一个B树的节点,根据磁盘块的物理参数来决定B树的阶数。
查找
B树的查找本质上和二叉查找树不存在差异:从根节点出发,比较关键字值和所储存的关键字值的位置。(应该插入到那个位置),然后走向对应的节点。因为B树的分支特别的多,因此会抛弃更多的分支,实现更少的访问外存的次数。
插入
查找树在插入的过程中都是插入到叶节点中,对于B树也是如此,只不过这里是指“最后一层的节点”而不是代表查找失败、不储存任何信息的叶节点。
判断节点是否有空位置:
- 有:新增加一个关键字。
- 没有:此时设计节点的分裂操作。
对于节点的分裂操作,可以看做如果当前节点在插入后存在个关键字,我们需要将这个节点进行分裂:
- 对关键字值进行排序后切分:
- ,,
- 左右两个区间重现变成两个新的节点。
- 中间元素?因为需要保证二叉树的定义,现在分裂后父亲节点的子节点数增加1,因此对应的父亲节点的关键字数要加1,因此这是一个不断向上访问的过程,直到访问的根节点,因此在最坏情况下我们可能需要让这棵树的整个元素+1!
删除
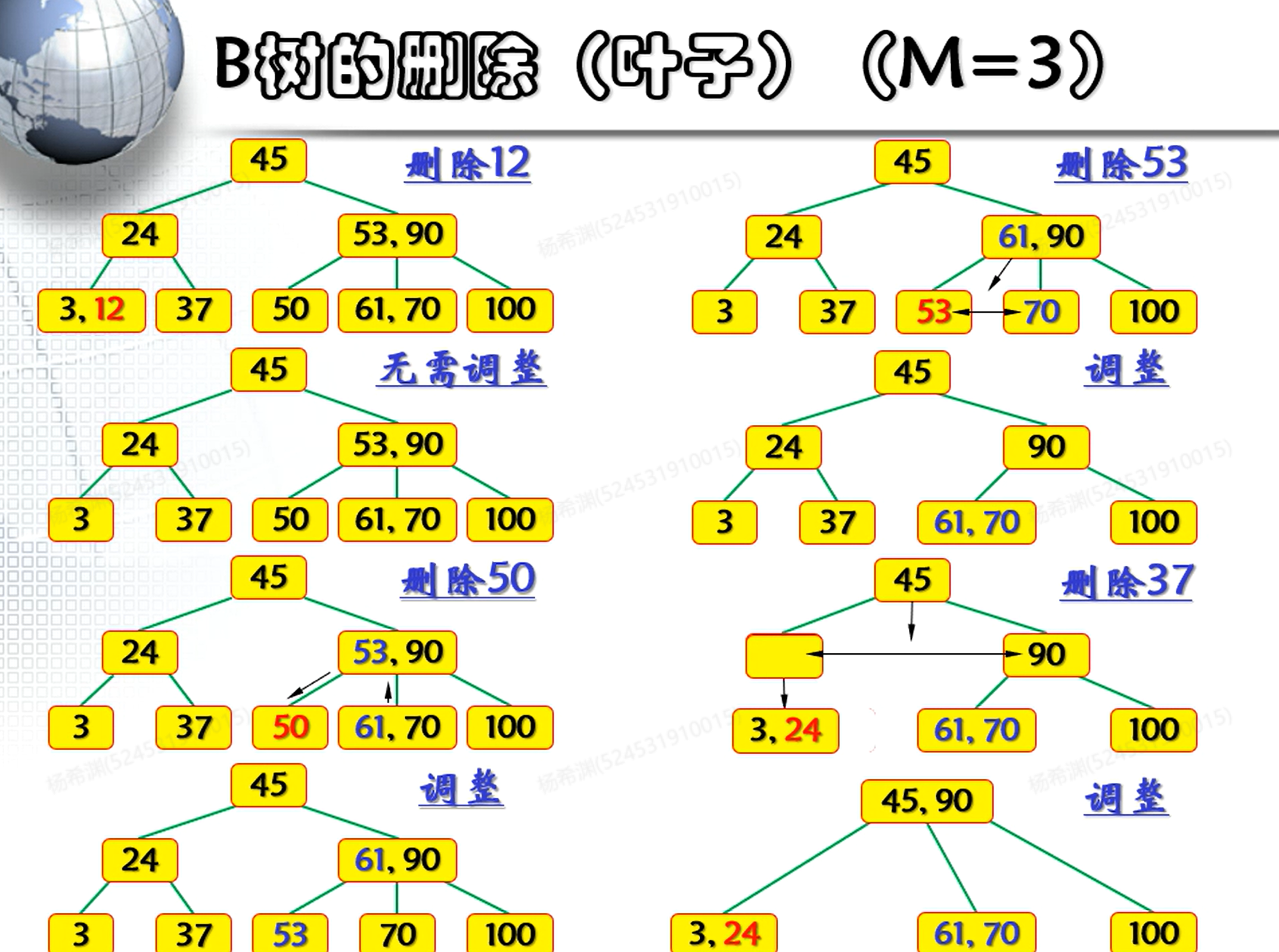
基本逻辑一样:先进行查询之后再寻找位于底层的替身元素。(其儿子节点中最小的值)
接着进行删除的操作:如果删除之后仍然满足二叉树的定义,直接删除关键字值(对应的索引)即可,否则需要调整。(我们需要保证度数不小于最小度数)
领养
领养父亲的一个关键字值,同时把兄弟的一个关键字值上提到父亲节点处。例如在这里删除的关键字值,此时需要将父亲节点的53下放(领养)到儿子节点。

合并
如果相邻的兄弟节点囊中羞涩,无法给出空余的节点,那么这个时候就需要将父亲节点的一个关键字下移合并给兄弟节点。
同样的,和分裂节点类似,此时需要继续向上调整祖父节点。

同样,也有可能出现整棵树高度减少1的情况:
B树的特点
回顾B树的数据结构,我们发现B树本质上是对在外存上一段连续空间内存上数据建立了索引文件,并且按照关键字值的大小构建起了一颗二叉搜索树。
这样的结构设计对于单点搜索操作是非常方便的,因为树的分支因子较大,因此可以尽可能的减少树的高度,实现更少的磁盘访问次数。对于数据的删除和插入操作:
- 插入:在外存数据中append到末尾,并将索引项插入到B+树中。
- 删除:直接删除B+树的索引项即可,不可以挪动外存中其他位置的数据,不然索引会乱掉。
缺陷
但是B树的缺陷也非常明显,从插入操作中可以看出,B树并没有对外存数据的储存做过多的约束(就直接append到这个连续内存数组的末尾,也不会清理删除的数据),这样就会导致:外存数据储存中关键字的值是乱序排列的!也就是说,B树实现顺序遍历的时间复杂度是灾难性的,因为他需要中序遍历一整颗树然后做次单点操作。
我们继续介绍B+树来弥补这个漏洞。
B+树
索引数据文件:即支持对单个数据的访问 又支持对这个文件按关键字的次序进行顺序访问。
B树建立了一个索引树(索引文件),可以支持快速查找某个记录,但是无法实现对磁盘的顺序访问,因此无法被称作索引数据文件,关键就在于数据是储存在外存的一个一段连续数组上的,而B树仅储存对应值的索引。
我们在B树的基础上可以得到B+树,实现顺序访问。
Chunking
我们期望B+树可以达到:
- 和B树时间复杂度相当的单点操作
- 可以实现按照关键字值对外存数据顺序遍历
- 插入 & 删除等操作的时间复杂度也应该和B树相当
我们自然会想到使用链表来储存外存中的数据,如果使用普通链表,时间效率会很低(随着的不断增大),因此我们需要使用块状链表即分块的思想来实现这个数据结构。
Definition
B+树的设计和B树略有不同:
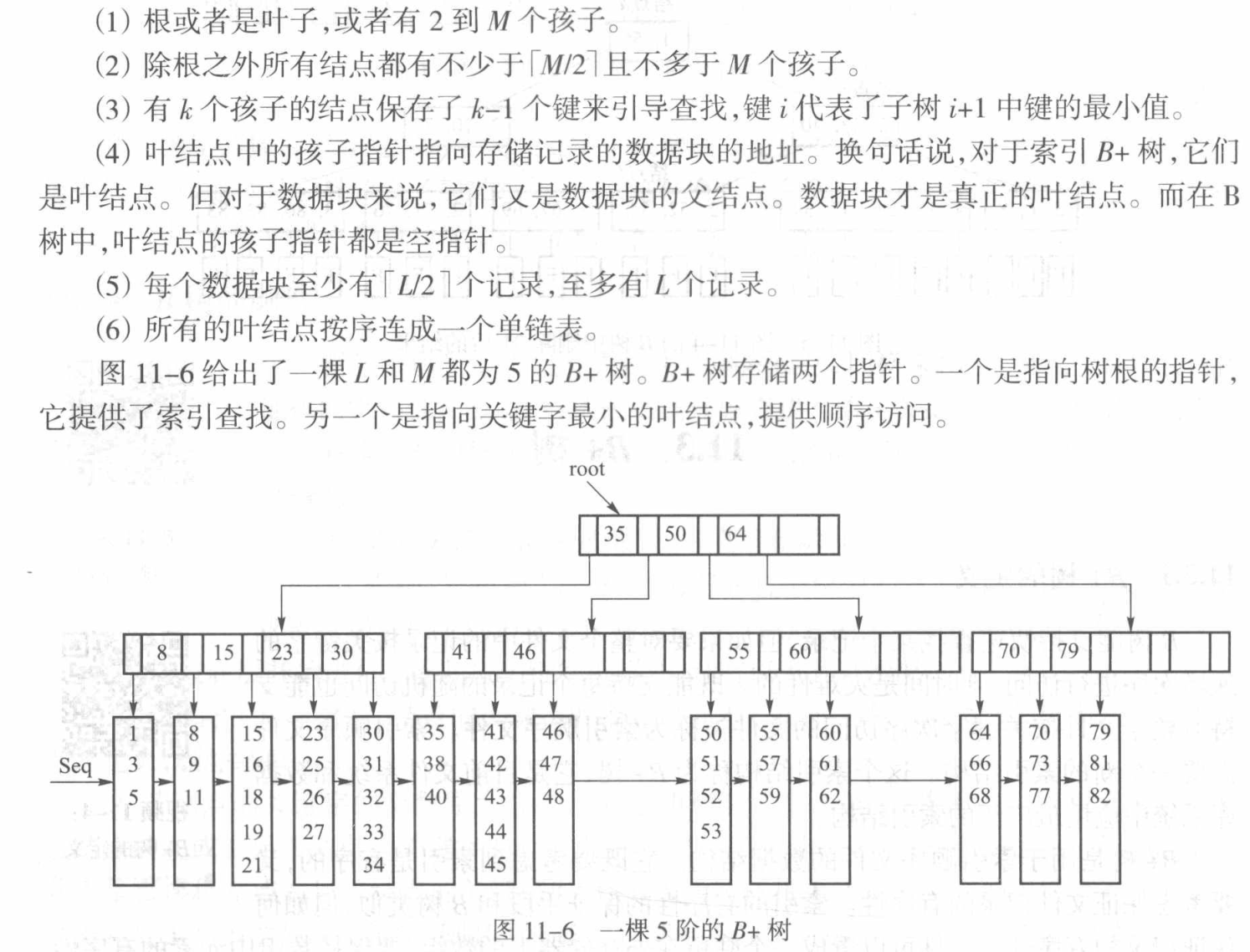
一些不同的地方:
- B+树直接将数据储存在叶子结点上(分块的思想)
- 对于每一个分块储存的数据元素的数量也有$\left \lceil \frac{L}{2} \right \rceil \le x \le L $的限制,保证平衡。
- 为了支持顺序访问,块内部和外部都必须保证有序。
其他关于索引树的节点的定义和B树类似,不做重复介绍。
Insert
和B树的操作类似,首先需要查找数据块知道叶子结点(数据节点的上一层)。
- 将新的数据插入对应的叶子(保证块外部的有序),并对块内部的元素顺序进行调整(保证块内部的有序)
- 如果出现非法情况:
- 需要被插入的块已经满员了,需要做节点的分裂操作。
- 如果当前节点还有空位(),即生成一个新的关键字储存在当前节点中(因为多了一个儿子)
- 如果没有空位了(),此时需要继续分裂,并且继续向上更新父亲节点
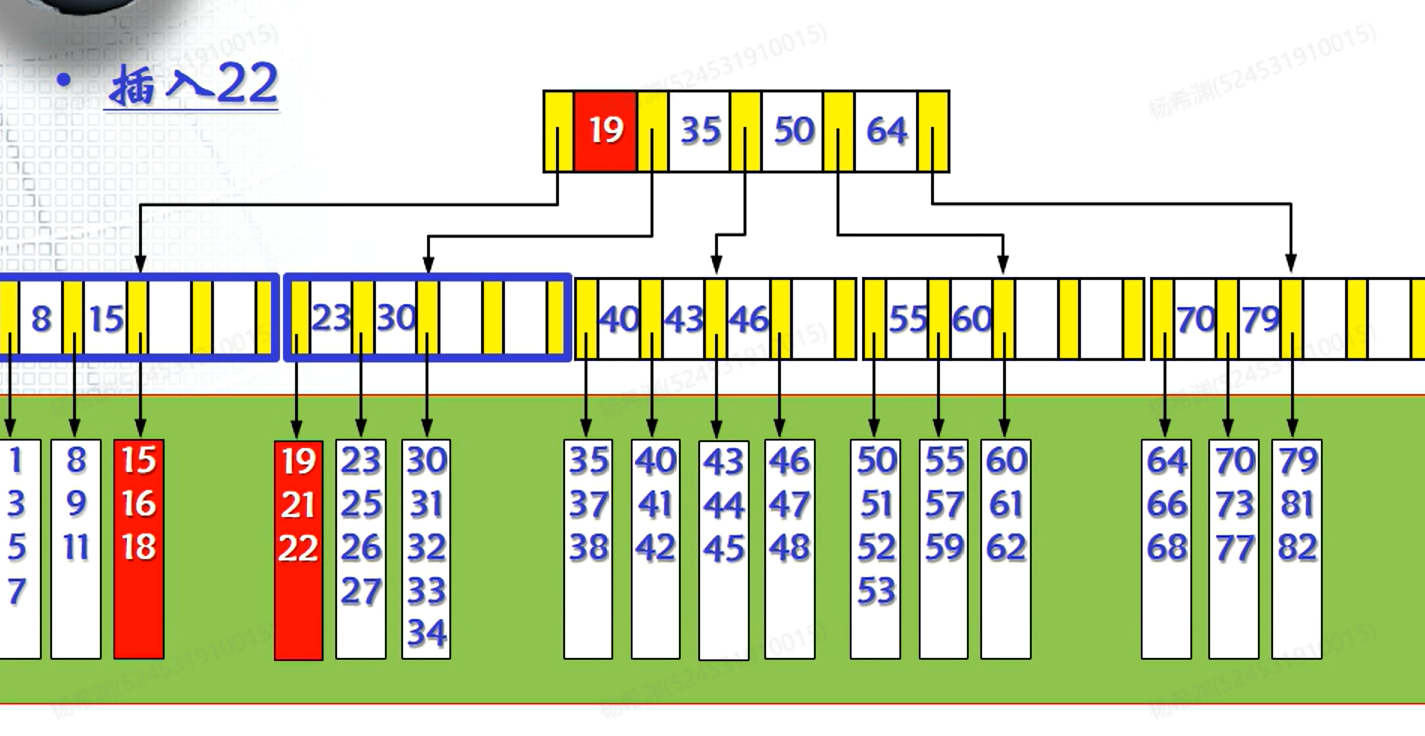
例如,在当前的树中插入22:
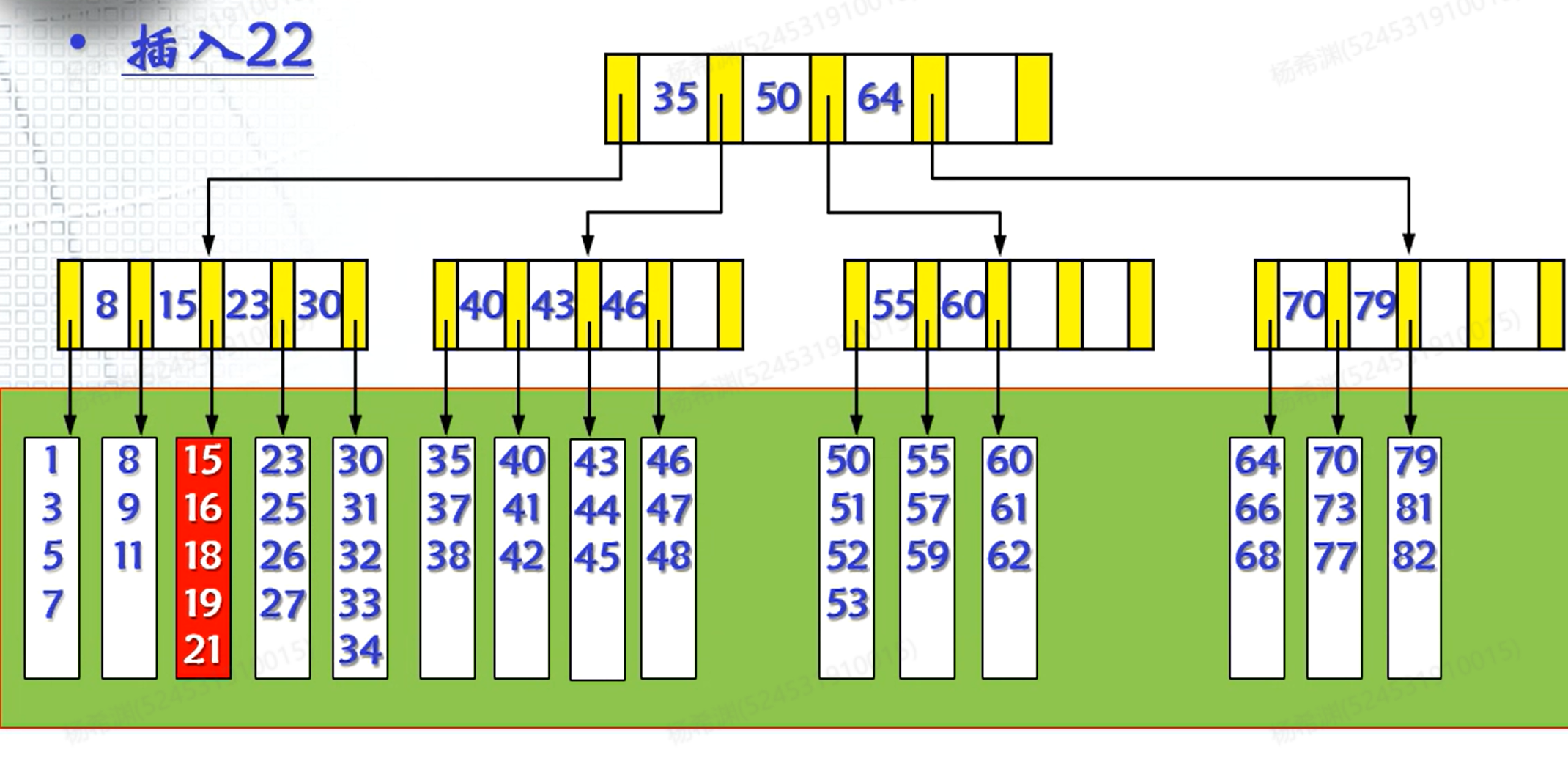
在这里发现插入之后满员了,分裂节点发现也没有办法容纳新的儿子,于是分裂上一层的节点。
Deletion
和B树非常类似,首先在对应的叶节点数据块删除对应的数据。如果满足定义就不作操作。(保证有序就可以)
- 如果删除元素导致某个块的数量不足,需要调整树的结构。(唯一可能出错的情况)
首先想到的是领养操作,即看左右的邻居节点,如果没办法领养,就需要合并邻居节点。
继续,此时父亲节点的儿子数和关键字树不匹配,父亲节点需要删除一个关键字值,继续向上过滤作删除操作。
M和L的选择
外存读写的单位为块,一个块存放一个节点能使IO效率最高。对于一个阶B+树来说:
- 32是关键字值的字节数(例如
int或者size_t) - 4代表分支的字节数(储存地址)
- 是单个磁盘块的大小
的选择和数据块的大小有关,通常(假设每一条数据记录256个字节)
复杂度分析
最坏情况下,所有节点都在下界,即有$\left \lceil \frac{2N}{L} \right \rceil $个叶节点。
树的最高深度
我们取,此时M是非常大的,树的层数就很低,把磁盘的访问次数下降到最低。(包括插入 & 删除 & 归并等等操作)
对于最坏的情况,分裂和归并到顶层,可能会导致树的高度升高1或者下降1,但是均摊来看还是很高效的复杂度。
Additional
B*树
B*树是在B+树基础上的进一步优化,在 B+ 树的非根和非叶子节点再增加指向兄弟的指针:
-
B*树要求非根节点至少2/3满(约66.7%),提高了空间利用率
-
当节点满时,B*树不是立即分裂,而是尝试将部分键值重新分配到兄弟节点(使用链表链接,可以“转移”)
-
只有当两个相邻兄弟节点都已满时,才会将这三个节点分裂为两个
-
这种策略减少了分裂频率,提高了空间利用率
R树
R树是为空间数据(如地理坐标、多边形等)设计的索引结构,与B+树家族有显著不同:
- 空间索引能力:
- B+树只能索引一维数据
- R树可以高效索引多维数据(如二维坐标、三维空间数据)
- 基于最小边界矩形(MBR):
- 每个节点存储的是空间对象的最小边界矩形
- 允许快速过滤不相关的空间查询
- 查询类型支持:
- 支持空间查询如"查找附近的所有点"
- 支持范围查询如"查找这个矩形区域内的所有对象"
- 支持最近邻查询
- 变体改进:
- R+树:避免节点覆盖区域的重叠,提高查询效率
- R*树:通过优化插入、分裂策略和强制重新插入来提高性能
- Hilbert R树:使用空间填充曲线对对象排序,改善结构
R树的关键在于对点做分类,并以此建立MBR,然后一层层向上建树,知道囊括数据中的所有点。
怎么一股线段树的味道。
外排序
显而易见,外排序就是对储存在外部储存器上数据进行的排序。以磁带储存器为例,其为顺序存储设备,完成有效的排序至少需要两个磁盘机,当然,多多益善。
三个磁盘机可以实现轮转的排序(并行的思想)
外排序主要考虑减少外存储器的读写次数,和内排序的时间瓶颈不同。
外排序的基本方法
- 预处理:分成有序片段(读入内存之后使用内排序)
- 归并:把有序片段归并成一个有序文件
- 多路归并
- 多阶段归并
预处理:置换选择
把外存的数据读入内存进行内排序的时候,我们希望每一个排序片段的size尽可能的大(即排序片段的数量尽可能的少),这样就可以使归并的次数尽可能的少,因为每一次归并操作都需要线性扫描两个待归并的序列,如果归并次数过多,意味着存在重复被扫描的元素。
我们介绍置换选择法,可以在的内存空间中实现平均长度的序列排序,这比最笨的一段一段排序要快很多。
- 在初始状态下,读入size为的序列,进行内排序(保证有序性),输出最小值。
- 这个时候内存存在空间剩余(这是我们需要利用的地方!),我们可以再读入一个值,并调整这个值所在的位置,维持有序性。
在这里内排序的时间开销远小于外排序,因此可以忽略这一点小小的优化。
我们既输出的值为,输入的值为:
- :说明如果参与这一次排序的话,他的位置肯定在的后面(还有机会!),因此作为新元素被插入,参与排序
- :没有机会,不会参与这一次排序,但是可以一直占着坑,自动进入下一次排序。
归并
多路归并
我们首先介绍两路归并:
两路归并需要四条磁带的使用:,每两条作为一组,两根作为输入,两根作为输出。
- 轮流将已被排序的片段写到两条磁带上。
- 取, 上各一个片段,进行归并操作,生成的新片段写入。
- 再将, 上剩下的片段转移到上,在同样的做类似的操作。
一般地,对于路归并,我们需要条磁带做运算,并且我们需要维护一个堆来找到最小的元素。
多阶段归并
使用多阶段归并可以实现条磁带的路归并。
