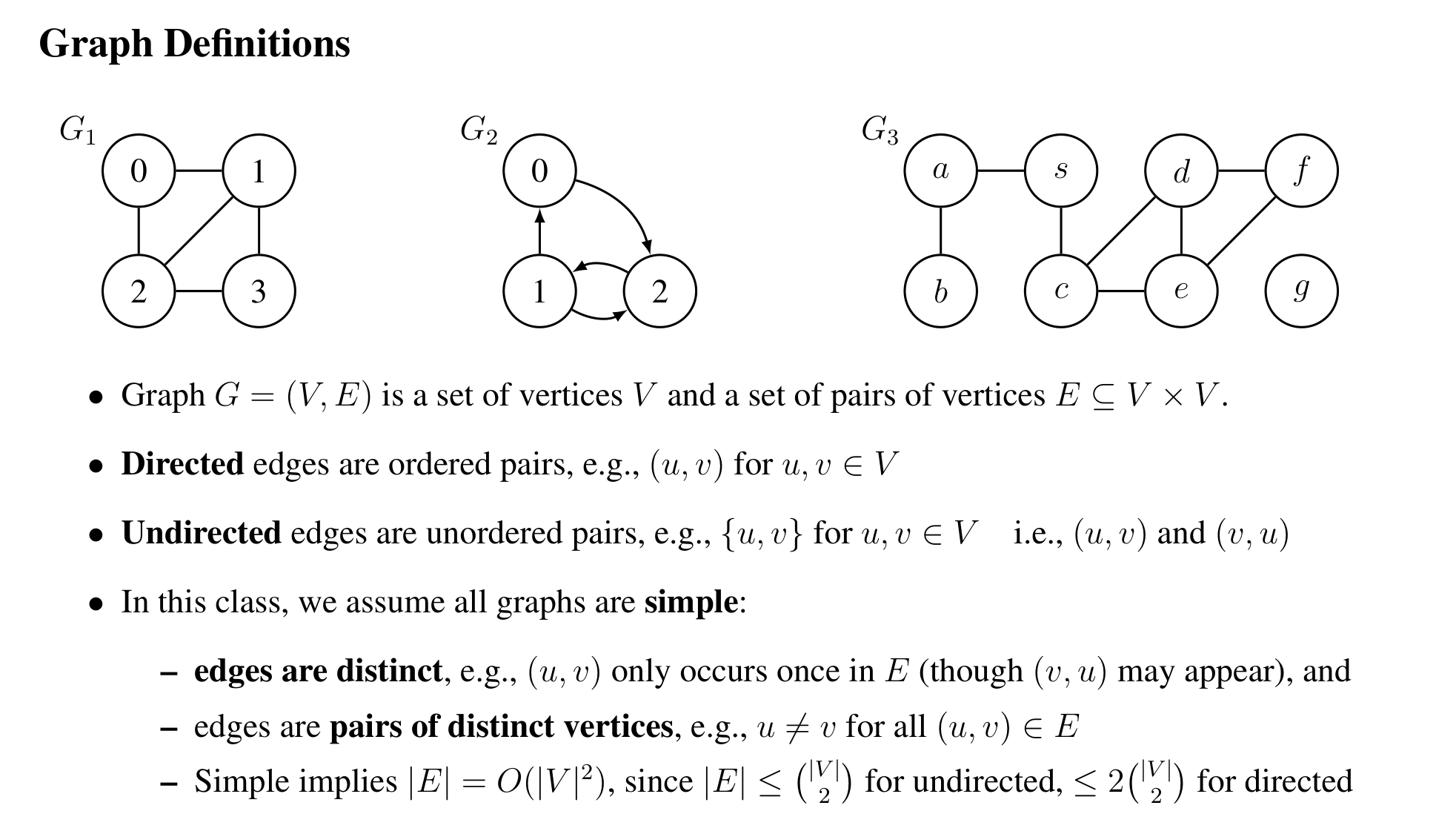
We first give the definitions of graphs! G(V,E) is a set of vertices V and a set of Binary Relations: E⊆V×V.
We don’t consider graphs outside the simple graph, like edges of (u,u).
We define ∣E∣ as the numbers of edges in the set E. Obviously, ∣E∣≤C∣V∣2=O(∣V∣2) for undirected, and ∣E∣≤2×C∣V∣2=O(∣V∣2) for directed.
Neighbor Sets/Adjacencies
The outgoing neighbor set of u ∈ V is Adj+(u)={v∈V∣(u,v)∈E}
The incoming neighbor set of u ∈ V is Adj−(u)={v∈V∣(v,u)∈E}
The out-degree of a vertex u ∈ V is deg+(u)=∣Adj+(u)∣
The in-degree of a vertex u ∈ V is deg−(u)=∣Adj−(u)∣
For undirected graphs, Adj−(u)=Adj+(u) and deg−(u)=deg+(u)
Dropping superscript defaults to outgoing, i.e., Adj(u)=Adj+(u) and deg(u)=deg+(u)
Adjacency list
A Set data structure to map u to Adj(u). Like every node in the tree needs to store the parent and child node, every elements need to store all its neighbors!
Common to use direct access array or hash table for Adj, since want lookup fast by vertex.
Common to use array or linked list for each Adj(u) since usually only iteration is needed.
Paths
A path is a sequence of vertices p=(v1,v2,...,vk) where (vi,vi+1)∈E,∀1≤i<k.
A path is simple if it does not repeat vertices.
The length (p) of a path p is the number of edges in the path
The distance δ(u,v) from u∈V to v∈V is the minimum length of any path from u to v, i.e., the length of a shortest path from u to v. (by convention, $δ(u, v) = ∞ $ if u is not connected to v)
Model Graph Problems
We can construct a shortest path tree based on the graph with O(∣V∣) size. To explain it more clearly, given a∈V, then the shortest path tree of a is a tree whose root node is a and contains all elements that are reachable to a in the graph. Moreover, the way from the root node a to the node b is just the shortest path from a to b in the graph.
Breadth First Search
How to return a shortest path from source vertexs for every vertex in graph? We can define P(x) as the second to last vertex on a shortest path from s, or you can just imagine it as the parent of x in the constructed shortest path tree of source vertex s.
Define P(s)==null.
Set of parents comprise a shortest paths tree with O(∣V∣) size!
Math principles: Assume vertex u appears in the shortest path from the source vertex s to the vertex x, which is more remote. Then the shortest of vertex u is just a subset of this path!
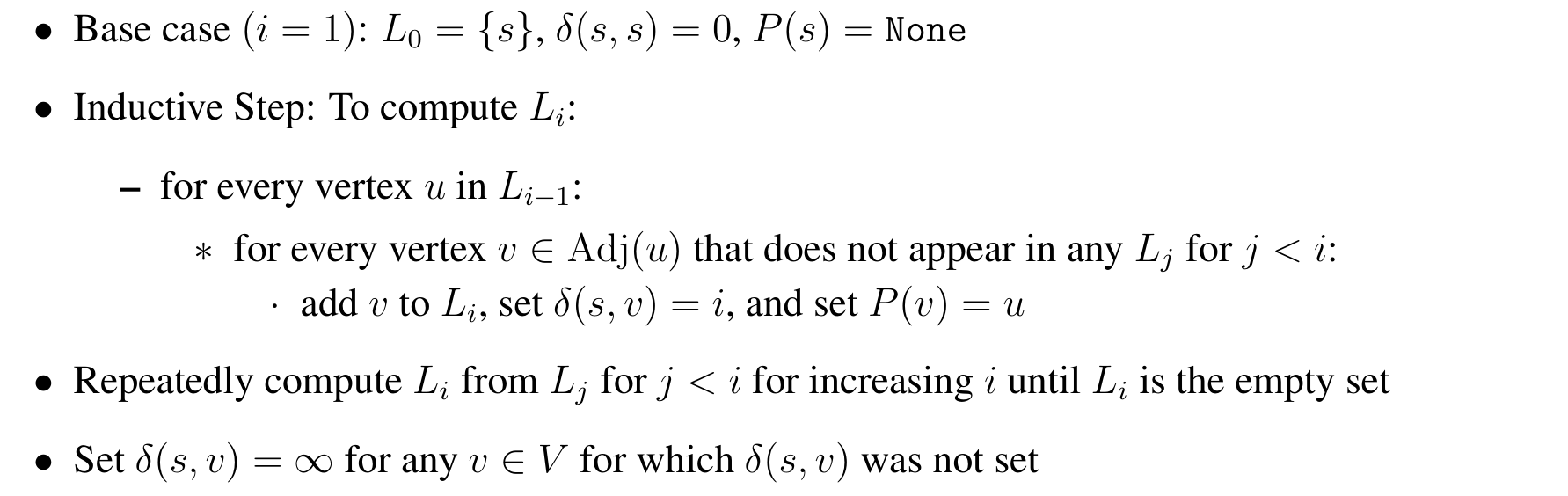
In the BFS algorithm, we need to compute δ(s,v) and P(v) for all v∈V.
Compute level sets Li={v∣v∈Vandd(s,v)=i} (i.e., all vertices at distance i)
The key to BFS is to categorize vertices by levels. For vertices at the same level, continuously traverse until all are visited, then proceed to the next level. Obviously, we know the shortest distance from s to s is 0. Then we can grow the tree based on it and find the shortest path for all vertex in the graph.
In real world simulations, we can use queue to store different levels of vertices, which means no vertices in Li is touched until all vertices in Li−1 is traversed.
Time complexity analysis: O(∣V∣+∣E∣). (Linear Time!)
Depth First Search
Single source reachability
Graph Path Problems
Single Pair Reachability(G,s,t)
Single Source Reachability(G,s)
Single Pair Shortest Path(G,s,t)
Single Source Shortest Paths(G,s) (SSSP)
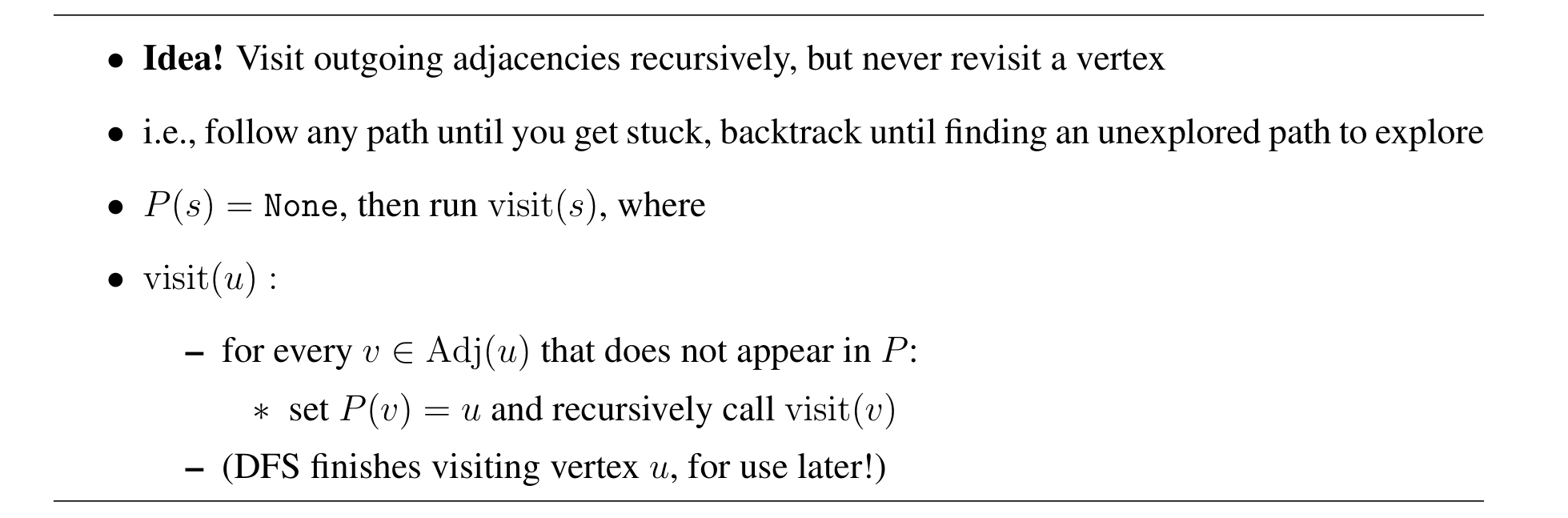
If we don’t need to solve the SSSP problem, we can use another algorithm! Intuition: Visit outgoing adjacencies recursively, but never revisit a vertex.
Of course, we can use the shortest path tree to solve a harder problem (SSSP), but it takes linear time! We can actually take less time by using the BFS algorithms.
Algorithms
For DFS algorithms, we use recursion to reach to the deepest depth and then traceback to the previous height.
Before finishing the algorithms, we define P(u)=v, there exists a path from u to v.
There maybe some problems! For example, if there exists (u1,v) and (u2,v) at the same time, definitely we can say P(v)=u1 and P(v)=u2. But what P(v) actually is the last vertex that is assigned to P(v). Then can this algorithm correctly finds all the reachable vertexes?
Let’s do the proof! Claim: DFS visits v and correctly sets P(v) for every vertex v reachable from s.
We use induction, induct on k, where k means vertices that can be reachable from source s with the k steps.
k=0 : is just the source vertex s!
Inductive step: Consider vertex v with δ(s,v)=k′+1. (The minimum length of the two vertexes)
Consider vertex u, the second to last vertex on some shortest path from s to v.
By induction, since δ(s,u)=k′, DFS visits u and sets P(u) correctly.
While visiting u, DFS considers v∈Adj(u).
Either v is in P , so has already been visited, or v will be visited while visiting u.
In either case, v will be visited by DFS and will be added correctly to P.
Depth First Search: O(∣E∣). (The number of edges)
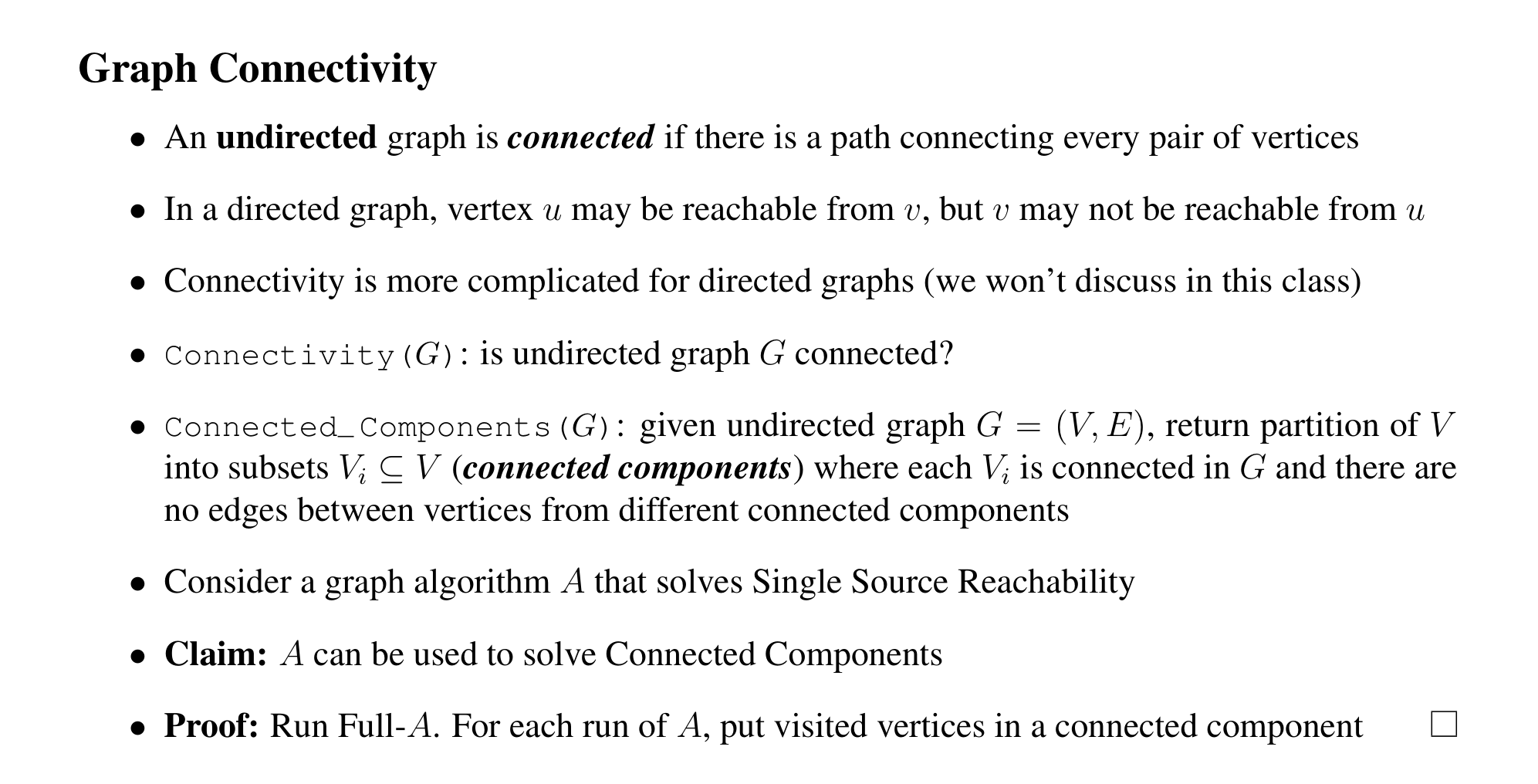
Connectivity of undirected graphs: Full DFS
Obviously, use DFS in one single vertex s cannot reach all vertex in the node. Thus, if we want to reach all vertex in the graph (Graph Traverse), we can actually use Full-DFS algorithms.
Iterate for all vertexes in the loop:
Choose an arbitrary unvisited vertex s, use BFS/DFS to explore all vertices reachable from s.
If the vertex s is reached, then we don’t need to use DFS(s) (let s to be the source node) again!
Time complexity: O(∣V∣+∣E∣).
Full DFS can be used to detect how many connected components (for undirected graphs) or strongly connected components (for directed graphs) exist in a graph. Each time a new DFS is initiated, it indicates the discovery of a new connected component.
Topological Sort
Several Definitions
DAGs (Directed Acyclic Graph): a directed graph that contains cycles.
Of course, a Binary Tree is a DAG😂.
A Topological Order of a graph G=(V,E) is an ordering f on the vertices such that: every edge (u,v)∈E satisfies f(u)<f(v).
A topological order only appears in the DAGs, or it will cause problems! (iff)
Assume (u,v)∈E and (v,u)∈E, which means f(u)<f(v) and f(v)<f(u). Contradiction!
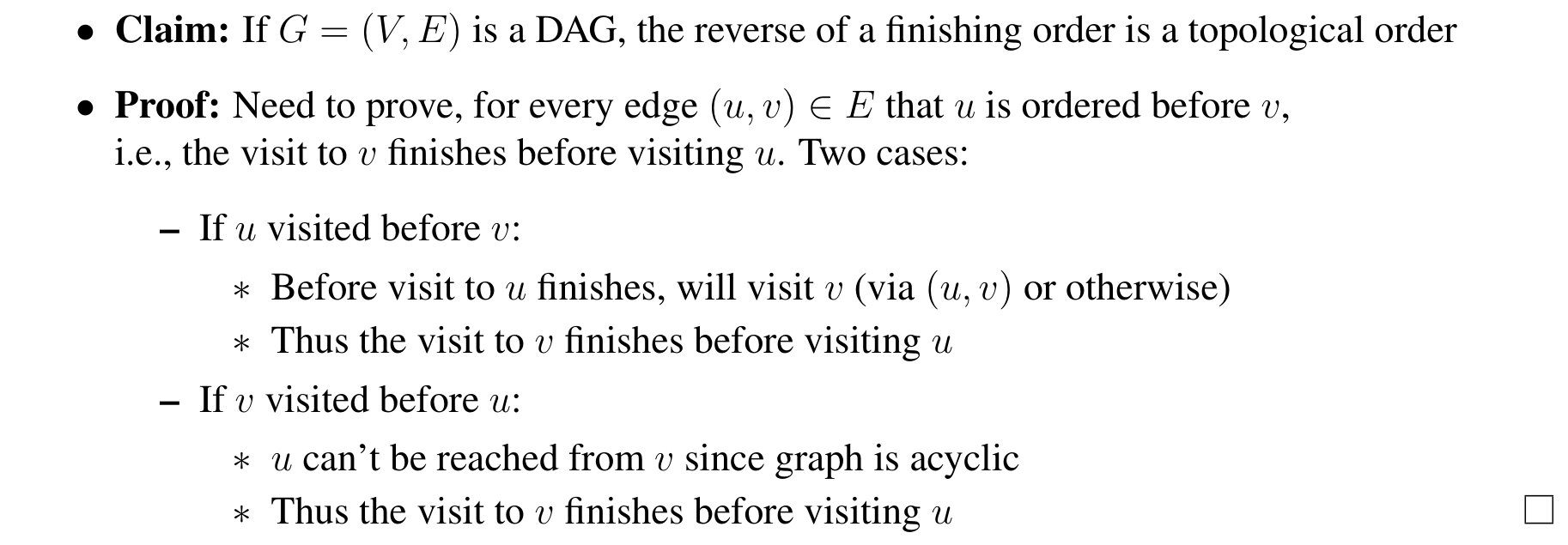
A Finishing Order is the order in which a Full-DFS finishes visiting each vertex in G.
Claim
The reverse of finishing order is just the topological order of the graph.
Basic principle: We need to prove the ending of function visit(u) is after the ending of the function visit(v). In Full DFS, every vertex will only be visited once, and the existence of (u,v) enables that:
In the first exploration of u, for the recursive function, the ending of function visit(v) is before visit(u). (u is in the lower stack frame.) (Unless that v has been explored previously, which is obviously right).
Cycle detection
How can we find a graph is Acyclic?
Consider the full-DFS algorithms, if reverse finishing order for Full-DFS is not a topological order, then G must contain a cycle. Check if G is acyclic: for each edge (u, v), check if v is before u in reverse finishing order.
Claim: If G contains a cycle, Full-DFS will traverse an edge from v to an ancestor of v.
To return such a cycle, maintain the set of ancestors along the path back to s in Full-DFS. (Or just the stack frame for the recursion function!)
structver_node { // node for vertices Ver value; edge_node *head; ver_node(Ver value_ = Ver(), edge_node *head_ = nullptr) { value = value_;// FIX: assign value head = head_; } };
structEulerian_Node { int Node_num; Eulerian_Node *next; Eulerian_Node(int ver) { Node_num = ver; next = nullptr; } };
ver_node *ver_array; int num_vers; int num_edges;
private: intfind(Ver v)const{ for (int i = 0; i < num_vers; i++) { if (ver_array[i].value == v) { return i; } } throwinvalid_iterator(); }
voidEulerCircuit(int start, Eulerian_Node *&beg, Eulerian_Node *&end){ // initialize beg = end = newEulerian_Node(start); while (ver_array[start].head != nullptr) { int next_node = ver_array[start].head->end;
// !attention, it is the undirected graph remove(start, next_node); remove(next_node, start); start = next_node; end->next = newEulerian_Node(start); end = end->next; } }
public: /** * @brief Construct a new adj List Grapgh object * * @param size * @param d */ adjListGrapgh(int size, const Ver *d) { num_vers = size; num_edges = 0;
ver_array = new ver_node[num_vers]; for (int i = 0; i < num_vers; i++) { ver_array[i] = d[i]; } }
/** * @brief Destroy the adj List Grapgh object * */ ~adjListGrapgh() { edge_node *current; for (int i = 0; i < num_vers; i++) { current = ver_array[i].head;// FIX: assign current while (current != nullptr) { edge_node *next_ = current->next; delete current; current = next_; } } delete[] ver_array; } intnum_ver()const{ return num_vers; } intnum_edge()const{ return num_edges; }
voidinsert(Ver x, Ver y, Edge w){ int u = find(x); int v = find(y); ver_array[u].head = newedge_node(v, w, ver_array[u].head); ++num_edges; }
/** * @brief remove the edges from u to v * * @param x * @param y */ voidremove(Ver x, Ver y){ int u = find(x); int v = find(y); edge_node *p = ver_array[u].head;
if (p == nullptr) { // no edges return; }
if (p->end == v) { // the first is the edge to be deleted ver_array[u].head = p->next; delete p; --num_edges; return; }
while (p->next != nullptr && p->next->end != v) { p = p->next; }
if (p->next != nullptr) { // p->next is the node to be deleted edge_node *q = p->next; p->next = q->next; delete q; --num_edges; } }
boolexist(Ver x, Ver y)const{ int u = find(x); int v = find(y); edge_node *p = ver_array[u].head; while (p != nullptr && p->end != v) { p = p->next; } if (p == nullptr) { returnfalse; } returntrue; }
// !Add new Function: Eulerian path std::vector<int> EulerCurcuit(Ver start){ std::vector<int> ans; if (num_edges == 0) { // absolutely there is no path // return the empty vector return ans; }
for (int i = 0; i < num_vers; i++) { int num_of_degree = 0; edge_node *r = ver_array[i].head; while (r != nullptr) { ++num_of_degree; r = r->next; }
if (num_of_degree % 2 != 0) { // no exists! return ans; } }
int start_pos = find(start);
// clone a list of adjlist ver_node *tmp = clone(); Eulerian_Node *beg, *end; EulerCircuit(start_pos, beg, end); while (true) { Eulerian_Node *current = beg; while (current->next != nullptr) { // check the afterward nodes of current if (ver_array[current->next->Node_num].head != nullptr) { break; } else { current = current->next; } }
// all the edges have been visited if (current->next == nullptr) { break; }
Eulerian_Node *q = current->next; // q is the node yet to be visited
// find a subcircle and connect them Eulerian_Node *tb, *te; EulerCircuit(q->Node_num, tb, te); te->next = q->next; current->next = tb; }
delete[] ver_array; ver_array = tmp;
Eulerian_Node *tmp_store; while (beg != nullptr) { ans.push_back(ver_array[beg->Node_num].value); tmp_store = beg; beg = beg->next; delete tmp_store; } return ans; }
ver_node* clone()const{ ver_node *tmp = new ver_node[num_vers]; edge_node *p;
for (int i = 0; i < num_vers; i++) { tmp[i].value = ver_array[i].value; p = ver_array[i].head; while (p != nullptr) { tmp[i].head = newedge_node(p->end, p->weight, tmp[i].head); p = p->next; } } return tmp; } };
intmain(){ // Example: Eulerian circuit in an undirected graph // Vertices: 0, 1, 2, 3 // Edges: 0-1, 1-2, 2-0, 0-3, 3-2 (all degrees are even) int vertices[] = {0, 1, 2, 3, 4, 5}; int numVertices = sizeof(vertices) / sizeof(vertices[0]); adjListGrapgh<int, int> g(numVertices, vertices);